
Autonomes Fahren beginnt in der virtuellen Welt
Autonomes Fahren steht für eine Zukunft, in der Mobilität sicherer, komfortabler und für alle zugänglicher wird. Damit Fahrzeuge ihre Umgebung zuverlässig erfassen, Entscheidungen in Sekundenbruchteilen treffen und Menschen entspannt ans Ziel bringen können, braucht es ein perfektes Zusammenspiel von Sensoren, Software und Steuergeräten. Virtuelle Fahrzeugentwicklung ist der Schlüssel zu dieser Vision: Sie ermöglicht es, komplexe Systeme realitätsnah zu simulieren, umfassend zu testen und sicher in den Alltag zu bringen – lange bevor das erste Fahrzeug auf die Straße rollt.
Durchgängige Test-
und Validierungsplattform

- Stack für autonomes Fahren durchgängig oder als Einzelkomponenten testen
- Erste Algorithmen (MIL) und seriennahe Software (SIL) testen
- Einzelne Steuergeräte oder integrierte Steuergerätenetzwerke mit mechanischer Hardware testen (HIL und VIL)

- Generierung beliebiger Szenarien mit durchdachten Bearbeitungstools, Scripting-Schnittstellen und Industriestandards
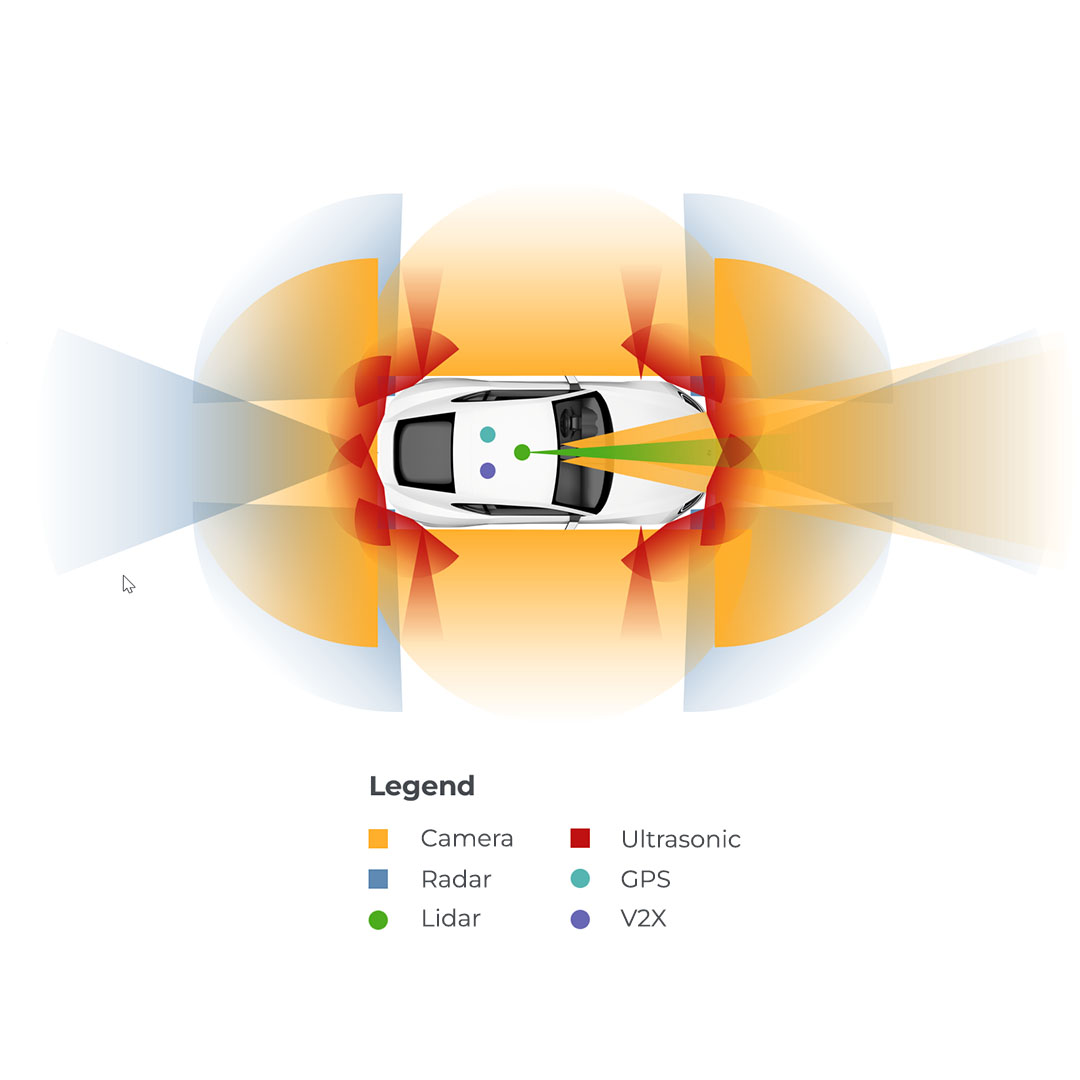
- Physical Sensor Models für die Erzeugung synthetischer Sensorrohdaten
- Echtzeitfähige Simulation vollständiger Sensoreinheiten autonomer Fahrzeuge
- Detaillierte und modulare Fahrzeugmodelle für eine überdurchschnittlich hohe Korrelation mit dem realen Fahrzeugverhalten

- Erfassung und Annotation von Daten aus der realen Welt
- Wiedergabe und Injektion von aufgezeichneten Daten mit Hardware-in-the-Loop
- Verknüpfung von Prüfgelände und virtueller Umgebung mit Vehicle-in-the-Loop

- Automatisierung und Integration von Testlösungen in Ihre CI/CD-Pipeline
- Hohe Skalierbarkeit und Effizienz von Cloud-basierten Simulationen
- Managementlösungen für Fahrzeugmodelle, Szenarien und Testflotten für vollständige Nachverfolgbarkeit
Anwendungsfälle
Durchgängige Entwicklungsprozesse für automatisiertes Fahren: Simulation, ODD und Standardisierung
In den vergangenen Jahren wurde intensiv diskutiert, wie automatisierte Fahrzeuge zugelassen werden können – besonders im Hinblick auf die Validierung spezifischer Einsatzbereiche (ODD). Der Nutzfahrzeugbereich bietet großes Einsparpotenzial. Erkenntnisse aus dem Pkw-Bereich helfen, etwa durch offene Tests, KI-generierte Szenarien und simulationsbasierte Validierung. Voraussetzung sind übertragbare Standards und glaubwürdige Simulation. Eine durchgängige Integration in Entwicklungsprozesse ermöglicht kontinuierliche und effiziente Validierung.

Entwicklung stabiler Platooning-Funktionen durch simulationsbasierte Positionsdatenanalyse
Beim Platooning fahren mehrere Lkw automatisiert im Konvoi mit geringem Abstand, was den Kraftstoffverbrauch senkt. Für eine fehlerfreie Funktion sind die Positionsdaten der einzelnen Fahrzeuge und die Stabilität des Konvois entscheidend. Dieser Artikel veranschaulicht, wie sich die dafür erforderlichen Algorithmen effizient per Simulation entwickeln und validieren lassen.

Risikofreie Validierung autonomer Fahrfunktionen durch virtuelle Prototypen und optimierte Entscheidungslogik
Autonome Fahrfunktionen müssen in jeder vorstellbaren Situation verlässlich und korrekt reagieren. Virtuelle Prototypen bilden die Grundlage für den Test des Sensorverhaltens und die Optimierung der Entscheidungslogik. So lassen sich auch komplexe Systeme umfassend validieren – risikofrei, reproduzierbar und unabhängig vom realen Straßenverkehr.

Systematische Absicherung komplexer Fahrfunktionen des SAE-Level 3+
Szenarien für Fahrfunktionen des SAE-Level 3+ decken komplexe Verkehrslagen systematisch ab, beispielsweise Engstellen aufgrund von Bauarbeiten oder Spurwechsel in dichtem Verkehr. Die Generierung auf Basis funktionaler Anforderungen ermöglicht eine reproduzierbare und zielgerichtete Absicherung automatisierter Systeme – zuverlässig, skalierbar und normgerecht.

Validierung der Entscheidungslogik von automatisierten Fahrfunktionen mithilfe des virtuellen Fahrversuchs
Die Entscheidungslogik von automatisierten Fahrfunktionen lässt sich mithilfe des virtuellen Fahrversuchs validieren. Um Konsistenz und Sicherheit zu gewährleisten, wird das Systemverhalten in komplexen und dynamischen Situationen getestet. Dadurch lassen sich Schwachstellen früh erkennen und beheben, bevor das Fahrzeug in den realen Verkehr kommt.

Systematische Auswertung sicherheitskritischer Szenarien zur Steigerung der Zuverlässigkeit autonomer Fahrfunktionen
Autonome Fahrfunktionen erfordern umfangreiche Langzeittests – der Fokus liegt dabei auf seltenen und/oder sicherheitskritischen Ereignissen. Eine automatisierte Ablage und eine strukturierte Ergebnisklassifikation ermöglichen eine systematische Auswertung. So lassen sich Schwachstellen früh erkennen, Risiken gezielt minimieren und die Systemzuverlässigkeit nachhaltig verbessern.






Interesse geweckt?
Kontaktieren Sie uns jetzt und vereinbaren Sie einen Termin mit unserem Team.